
Teaching Shortest Path Algorithms with a Robot and Overlaid Projections
Teaching Shortest Path Algorithms with a Robot and Overlaid Projections
This is a research collaboration with Pavel Jolakoski, Klen čopič Pucihar and Matjaž Kljun.
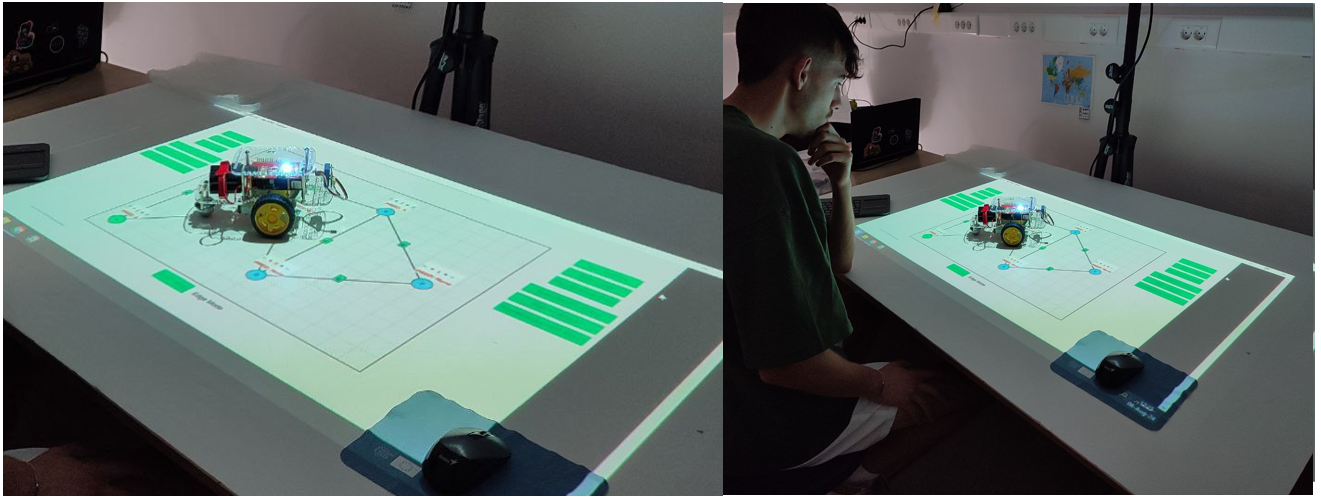
Robots have the potential to enhance teaching of advanced computer science topics, making abstract concepts more tangible and interactive. In this paper, we present Timmy a GoPiGo robot augmented with projections to teach shortest path algorithms in an interactive learning environment. We integrated a JavaScript-based application that is projected around the robot, which allows users to construct graphs and visualise three different shortest path algorithms. These algorithms are visualised with colour-coded edges and vertices. Animated graph exploration and traversal are augmented by robot movements. To evaluate Timmy, we conducted two user studies. An initial study (𝑛 = 10) to explore the feasibility of the concept where participants were just observing both robot-synced and the on-screen-only visualisations. And a pilot study (𝑛 = 6) where participants actively interacted with the system, constructing graphs and selecting algorithms. Our findings suggest that robots offer an engaging tool for teaching advanced algorithmic concepts, but highlight the need for further methodological refinements and larger-scale studies to fully evaluate their effectiveness.
Update! Our paper was accepted and was presented in the recent HCI 2024 Conference. Open access PDF can be found COMING SOON.